Daniel Seita
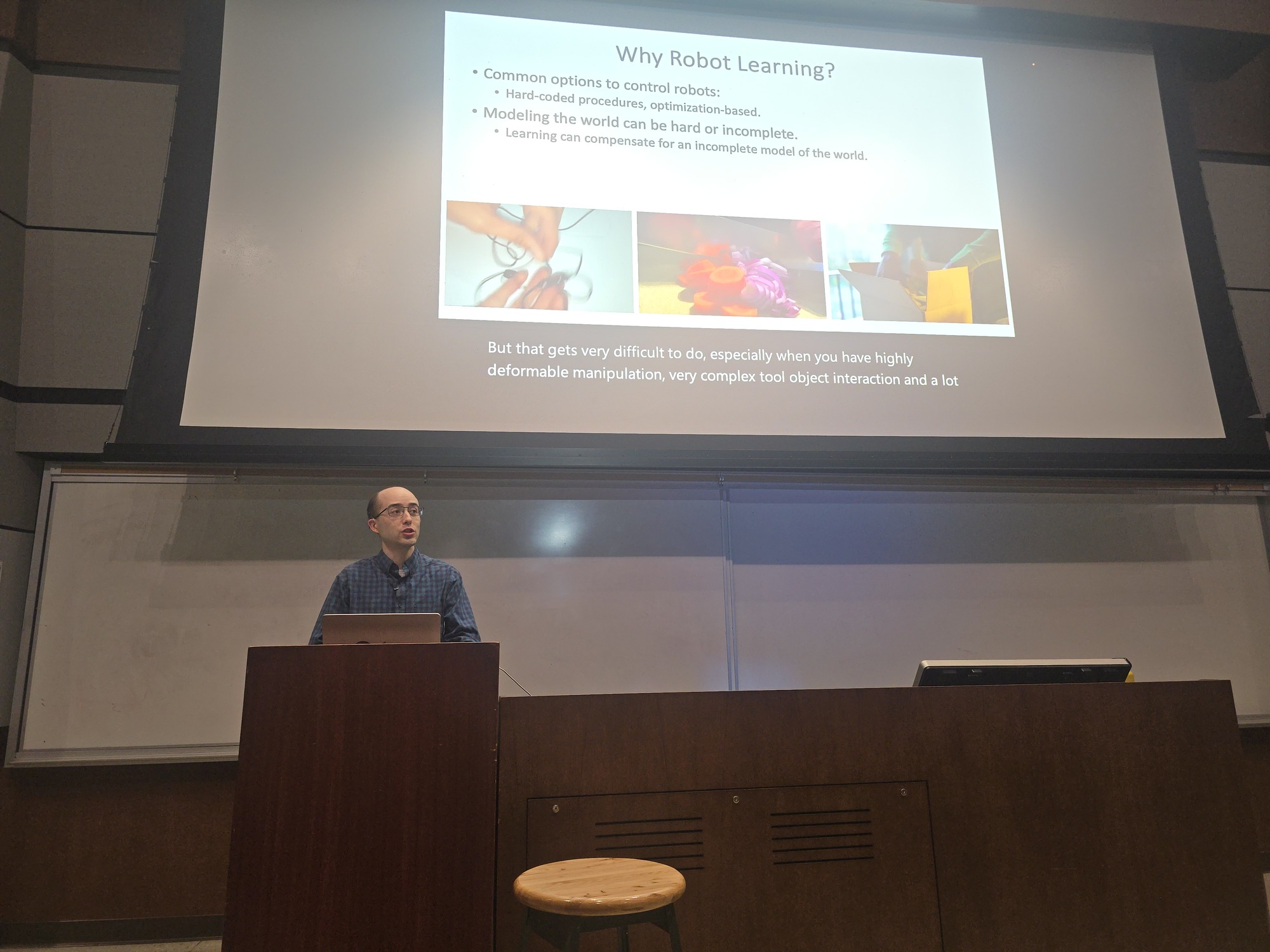
I'm an Assistant Professor of Computer Science at the University of Southern California. I'm interested in robotics, computer vision, and machine learning, with a focus on robotic manipulation of visually and geometrically complex objects. Please look at the lab website to get a sense of what we focus on these days. Ultimately, I hope that this research can help open the doors for robotic manipulation in unstructured environments.
If you are a student interested in working with me, please check the Sensing, Learning, and Understanding for Robotic Manipulation website to get involved.
Formal Bio Contact Github G. Scholar C. Vitae
Research Stmt (Nov. 2025) Communication Tips To International Students
Daniel Seita is an Assistant Professor in the Computer Science department at the University of Southern California and the director of the Sensing, Learning, and Understanding for Robotic Manipulation (SLURM) Lab. His research interests are in computer vision, machine learning, and foundation models for robot manipulation, focusing on improving performance in visually and geometrically challenging settings. Daniel was a postdoc at Carnegie Mellon University's Robotics Institute and holds a PhD in computer science from the University of California, Berkeley. Daniel has been honored with the AAAI 2026 New Faculty Highlights program. He presents his work at premier robotics conferences such as ICRA, IROS, RSS, and CoRL.
seita@usc.edu
takeshidanny@gmail.com
If you are contacting me to inquire about research opportunities, please check my lab website for more information. You do not need to email me to ask if I am taking on PhD students. I am much more likely to respond to emails tailored to me, in contrast to mass emails.
USC has an aggressive spam filter which may cause me to miss some non-USC emails, so it's OK if you want to also cc the Gmail there but should (usually) not be necessary.
There is no need to address me as "Dear Sir," "Esteemed Professor," "Respected Professor," or other excessively formal phrases. If you wish to send me an email, please address me by my first name (e.g., "Hi Daniel, ...") followed by a tailored message, rather than an email that addresses me as "Professor Seita, ..." followed by a non-tailored message that could be sent to many faculty. From my view, tailored emails are much more respectful than non-tailored ones. Of course, each professor is different, so if another professor says you must call him/her "Professor X," then make sure you do that!
For in-person conversations, my last name is pronounced like "say-ta" with two syllables. It is spelled "Seita," not "Sieta."
I do my best to learn about other cultures, countries, and governments, by reading and consulting a wide variety of references. With respect to any group's political leadership, there are a range of policy issues to which I might agree or disagree. I am careful to not conflate a country's political leadership and the opinions of a citizen of that country.
I fully support people from all across the world coming to our country's schools and institutions, which is necessary to build the world's best team. I think the highly international nature of Robotics and AI is one of its best qualities, and I hope it remains like this. I am not afraid to critique the U.S. government if they put up roadblocks to this (you can find information about that online if you search well enough). Students who come from abroad can expect to have me as an ally.
If you need a letter of recommendation for your permanent residency, send me an email. I am usually able to help with this.

Sept 25, 2026
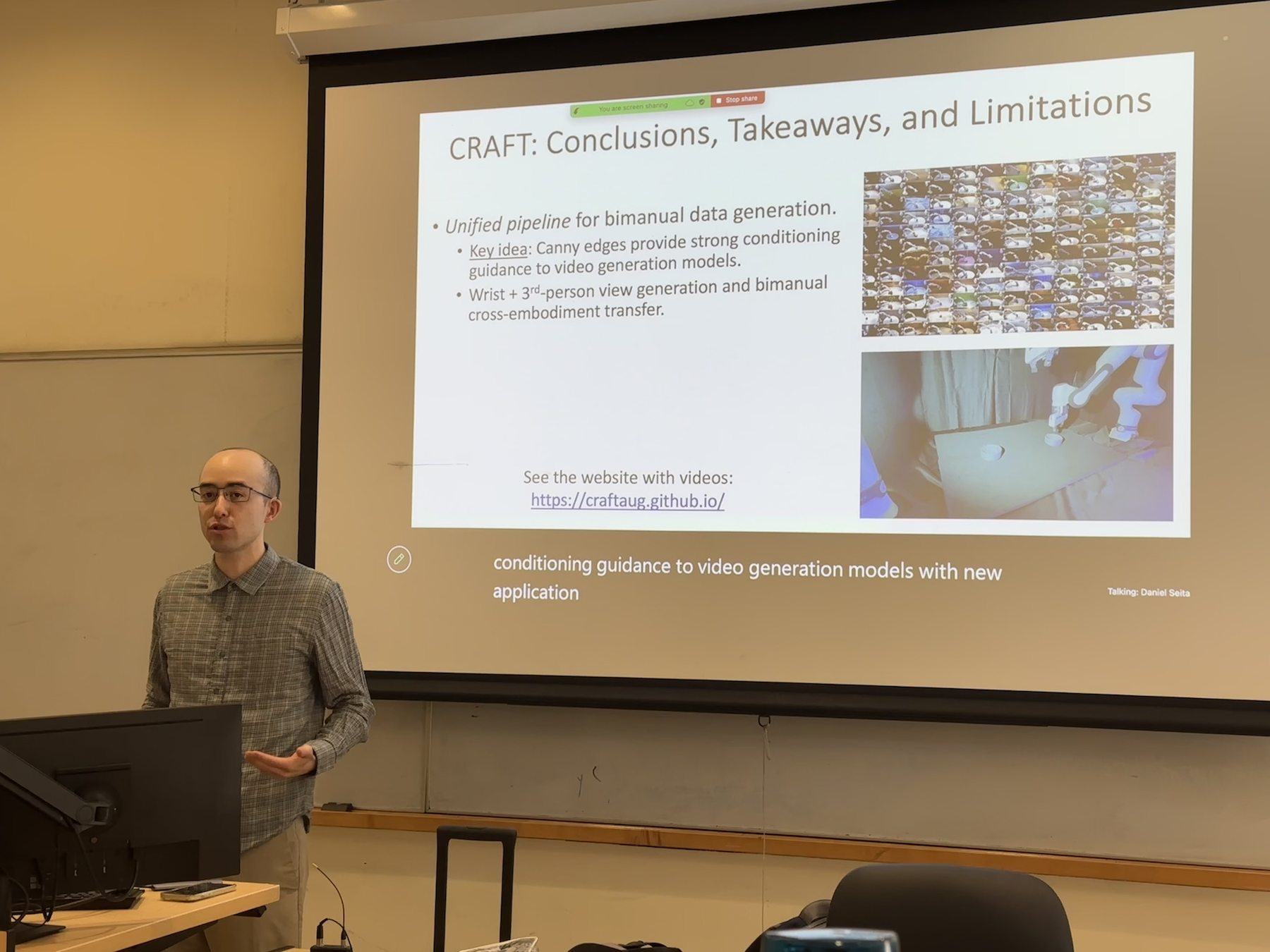
Come meet the SLURM Lab at IROS 2026 in Pittsburgh! We have: CRAFT (led by Jason), DexMulti (led by Hao), HANDFUL (led by Ethan and Yunshuang), ICLR (led by Toan), Q-DIG (led by Sid), and PREFAIL (led by Zeyu).Aug 27, 2026
My new Robot Manipulation course (CSCI 645) has been approved for Fall 2026. Please check the course website for additional information.May 05, 2026
I received support from NVIDIA's Academic Grant Program, Honda Research Institute, Dexmate, and Google's TPU Research and Education program for our work in robot manipulation.May 01, 2026
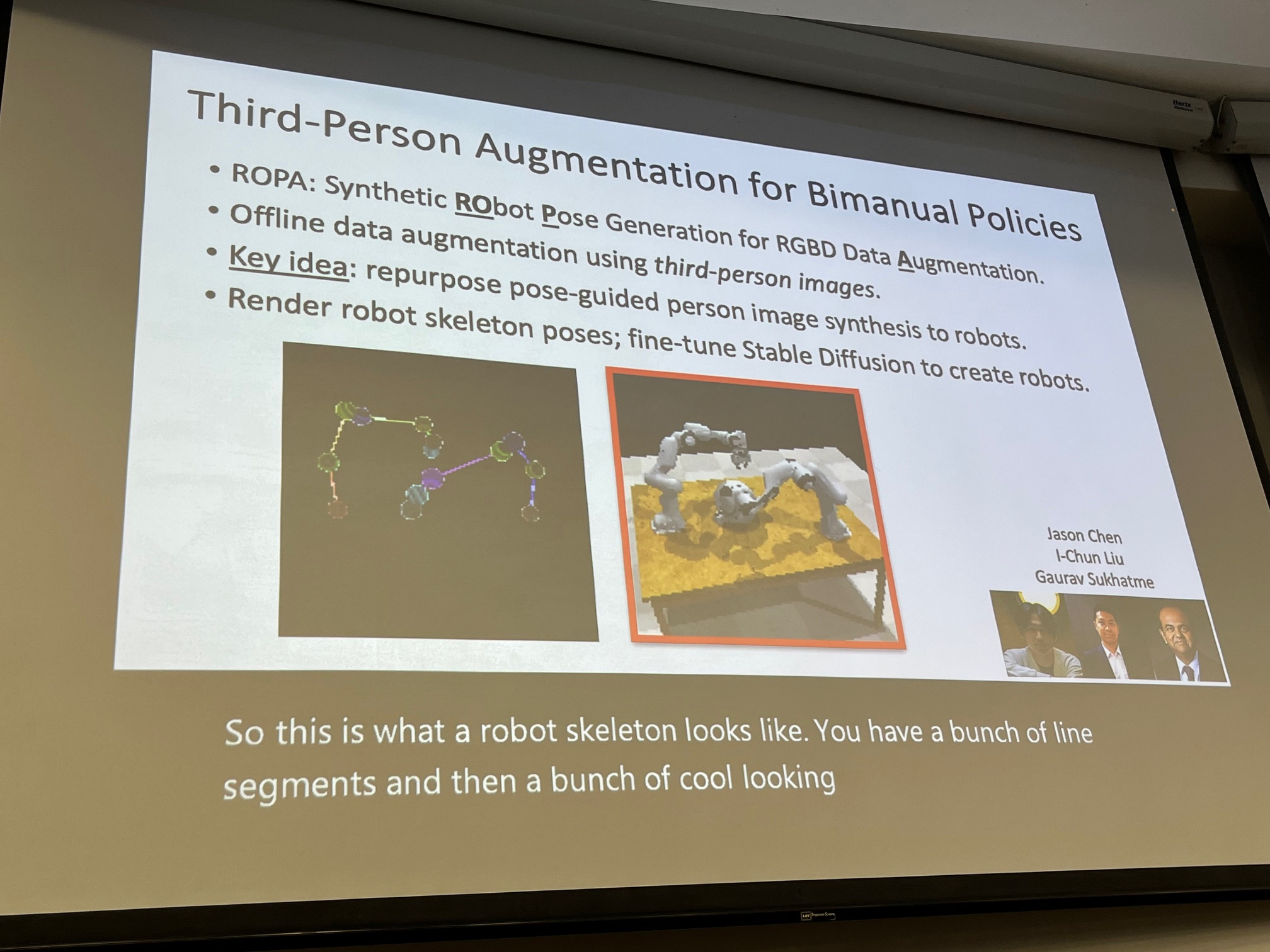
I'm thrilled to announce that we are presenting a number of papers at ICLR 2026 and ICRA 2026. I would like to higlight ReCouPLe (led by Minjune), IMPACT (led by Yiyang and Karan), GD2P (led by Yunshuang), and ROPA (led by Jason), as representative works in the lab. Congratulations to all the students and colleagues!Jan 22, 2026
I'm honored to be invited to the AAAI 2026 New Faculty Highlights program! If you are attending AAAI 2026, come say "hi" in Singapore.Sep 27, 2025
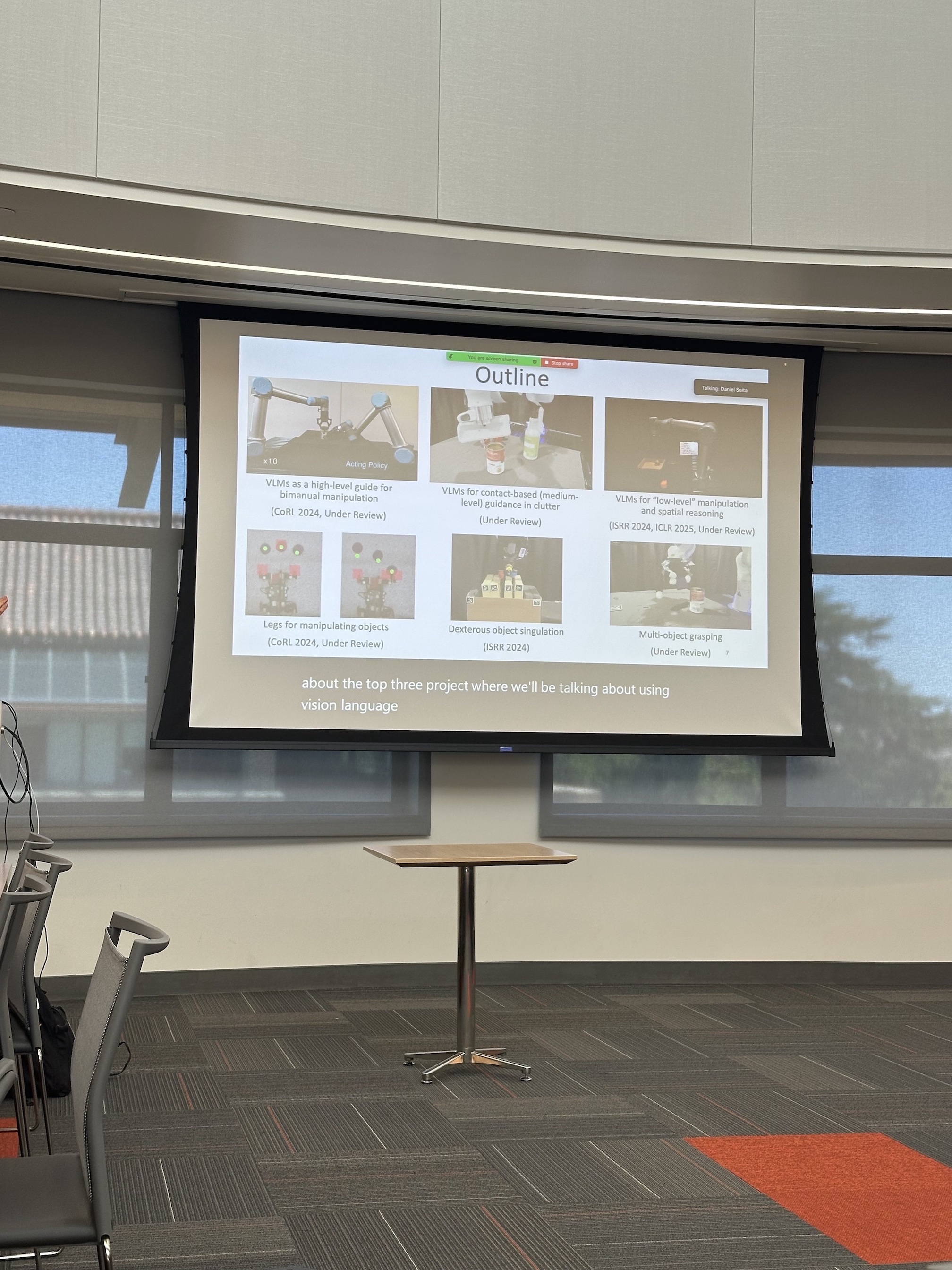
We are presenting four papers at CoRL 2025 in Seoul, South Korea. I'm excited about the progress we have made in benchmarking VLMs, data augmentation, robots and granular media, and robot learning from a single image.Aug 28, 2025
I am teaching CSCI 545 again, the Introduction to Robotics class. I am working with two fantastic TAs (Ya-Chuan Hsu and Zeyu Shangguan). As with the previous edition, I will post my lectures online so others can follow.May 05, 2025
Two papers accepted at ISER 2025 (in Santa Fe, USA). I'm excited to share our progress in building a multimodal hand and benchmarking VLMs for human-robot interaction.Dec 10, 2024
We will be presenting two papers at ISRR 2024 (in Long Beach, USA). Come meet us to discuss more about GPT-Fabric and SopeDex, led by some excellent undergraduate and master's students.Nov 01, 2024
We are presenting two papers accepted at CoRL 2024 (in Munich, Germany). These are about data-efficient bimanual manipulation and manipulating granular media.Aug 01, 2024
I'm teaching CSCI 699 in the fall. This is the second edition of this research seminar course, and we have a brand new set of impactful papers that we will cover this time around.Jan 01, 2024
I'm teaching CSCI 545 in the spring. This is an Introduction to Robotics course, and covers fundamental topics. I'm working with a great team of TAs: Hejia Zhang and Shihan Zhao.Aug 16, 2023
Moved to USC to begin my faculty career! I'm excited to teach CSCI 699 in the fall, a research seminar on robot manipulation.2026
International Conference on Control, Automation, and Systems (ICCAS) 2026 (link){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
2025
Fudan University (virtual, screenshot)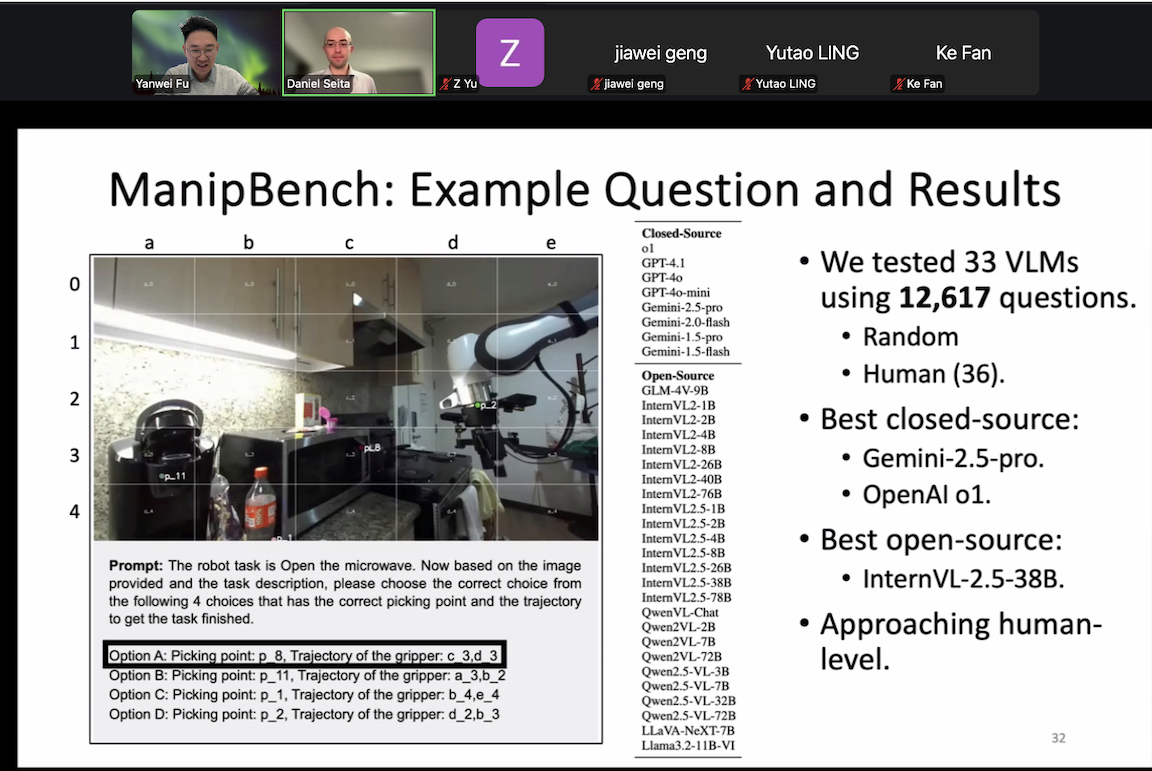{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
2024
Osaka University (photo){kind=link}
{kind=link}
2022
Cornell University, Robotics Seminar (video)2021
University of Toronto, AI in Robotics Seminar (video)Sp2029
To be decidedFa2028
To be decidedSp2028
To be decidedFa2027
No teachingSp2027
Likely CSCI 545 and CSCI 445LSp2026
No TeachingSp2025
No Teaching2026
Area Chair, CoRL2025
Area Chair, CoRL2024
Area Chair, CoRL2023
Inclusion Co-Chair, CoRL2022
Inclusion Co-Chair, CoRL2019+
Berkeley and CMU AI Mentorship Programs2017+
Primary maintainer, Berkeley AI Research Blog